Part 1 of a guest blog series written by Tom Denton
Barbeque (2018)
At a friend’s BBQ a few years ago, I was making conversation with a stranger, as you do. Nice chap who did something financial that I didn’t understand (or want to). After he learnt that I was a writer and that I was interested in all automotive technologies, electric and automated driving vehicles in particular, he took a deep breath and was off! What he didn’t ‘know’ about autonomous cars, as he called them, was not worth mentioning. Actually, perhaps what he did know wasn’t worthy of mention either. My point here, is how absolutely convinced he was that fully autonomous cars would be on the roads in a year or two. This was because, apparently, they were already so far advanced.
I gave my view that it would be at least 2030 before anything approaching autonomy would be on the road and that we would be better to describe these cars as automated rather than autonomous, he disappeared! He was a lovely man but illustrated my view that the hype about autonomous cars has far exceeded their technical ability.

Figure 1 Tastes like chicken
Challenges
For me, there are still five major challenges that can hold back automated driving vehicle (ADV) developments but autonomous vehicles in particular; interestingly only one of these is wholly technology related:
- Training: Drivers are becoming used to some self-driving features, adaptive cruise control, lane guidance etc. and can expect too much from them. They will need to further understand the limitations of the vehicles such that when the machine beeps, they need to take over.
- Accidents: In the event of a collision, it is not yet fully clear where the responsibility will lie. Decisions must be taken by the software, for example, to protect the car occupants first, or pedestrians first.
- Stupidity: Game theory researchers suggest that some people will learn to play chicken with the cars on crossings as they ‘know’ the car will have to stop. It may even be the case that more children play near roads because it is perceived to be a safer space. If a bird or squirrel runs across the road – the car may decide to stop very quickly.
- Interaction with people: We have developed social norms to let people out of junctions, or turn before us. Head nods, waves, light flashes etc. are used for this. The cars will ‘talk’ to each other but in a mix of autonomous and non-autonomous cars this is still a big problem to be solved.
- Weather: Cars cannot as yet manage a snowy road in the same way they can a nice bright sunny one. Road signs can become obscured and slippery surfaces require a very different driving technique. Manufacturers are working on this, but there is still some way to go.
The level of automated driving will increase over the years (what we could perhaps describe as VADAS – very advanced drive assistance systems) but full autonomy (a vehicle without driving controls that could cope with ANY scenario) is still a long way off.
There are six levels of automated driving defined by the SAE (somewhat simplified here):
- Level 0 – No Driving Automation (the driver does everything)
- Level 1 – Driver Assistance (the system executes either the longitudinal OR the lateral vehicle motion control, the driver supervises and takes over if the automation is inappropriate)
- Level 2 – Partial Driving Automation (the system executes either the longitudinal AND the lateral vehicle motion control, the driver supervises and takes over if the automation is inappropriate)
- Level 3 – Conditional Driving Automation (the system controls all driving functions but WILL issue a request to the driver to take over if needed)
- Level 4 – High Driving Automation (the system controls all driving functions but MAY issue a request to the driver to take over if needed, the driver is effectively a passenger but should be ready to take control on request)
- Level 5 – Full Driving Automation (the system does all the driving and may delay a user request to take over, the driver may request control)
There are no level 3 cars on the road at this time (mid 2021). Level 5 is full autonomy.
How does a human drive?
There are arguably an infinite number of situations that a human driver has to deal with when operating a vehicle. All of them involve the process of sensing, understanding and then acting. See, think, act is another popular version of the process, but they all mean the same thing.
Figure 2 Sense, understand, act
Turns across traffic account for about 20% of accidents, turns the other way only for about 1%, so we will look at this manoeuvre or action in more detail to illustrate the challenge faced by humans and machines.
Example situation: Driving along the road at the normal speed and then turning right (UK) from a normal two-lane, two-way road into another two-lane, two-way road at right angles. These are the steps a human will take:
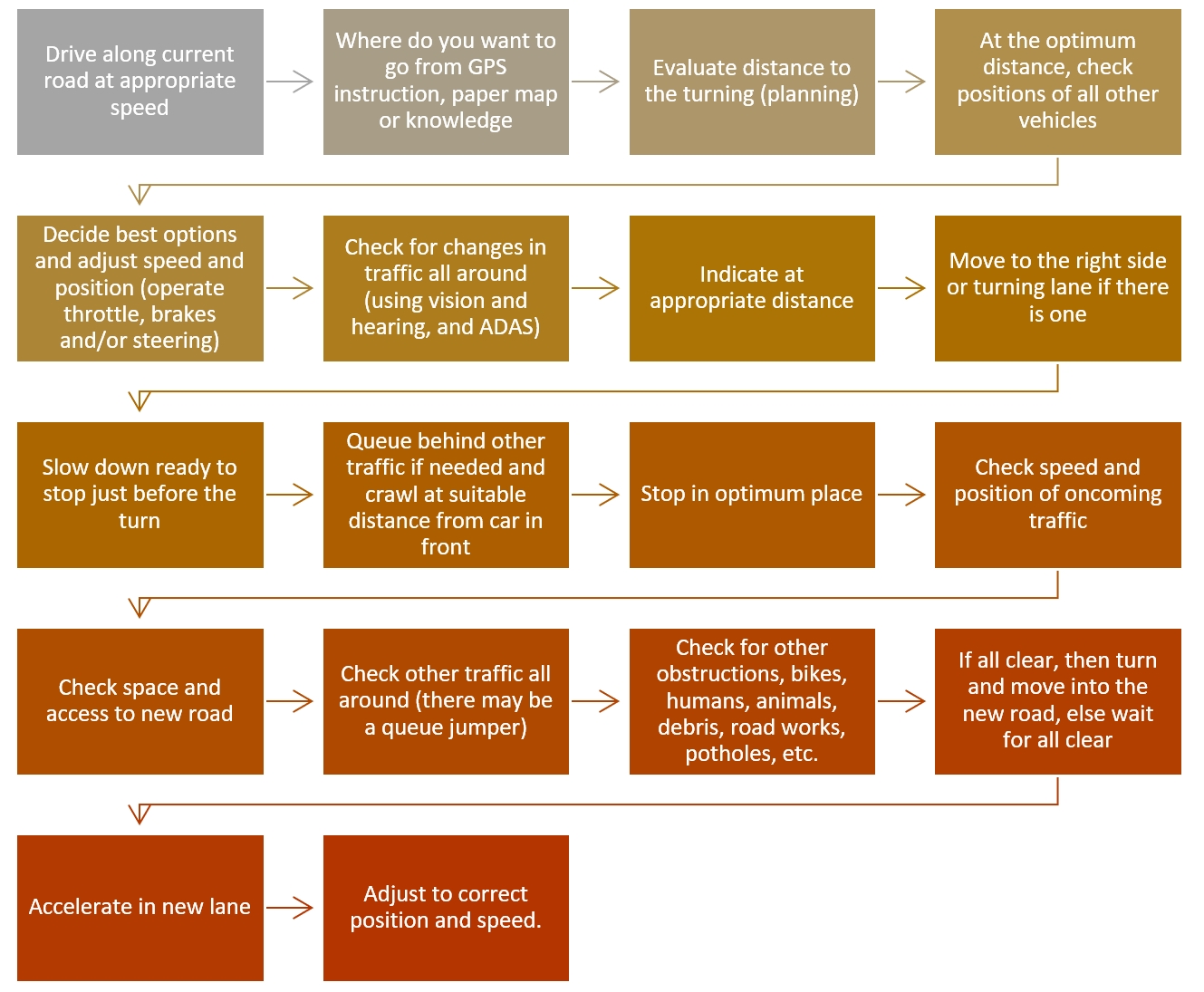
Figure 3 Sequence of events when turning across oncoming traffic
I am sure I have missed something in the above sequence but it illustrates the complexity and perhaps why learning to drive is difficult. Once you are a practiced driver many of the points on the list become almost instinctual. Not for a robot though (an ADV is a robot), it has to calculate each step every time.
How does a machine drive?
Arguably, an autonomous car (level 5) follows the same process as the human and can even get itself out of a problem situation if necessary. Automated driving vehicles (levels 1 to 4) do similar things but at lower levels and they require human intervention for problems they cannot understand.
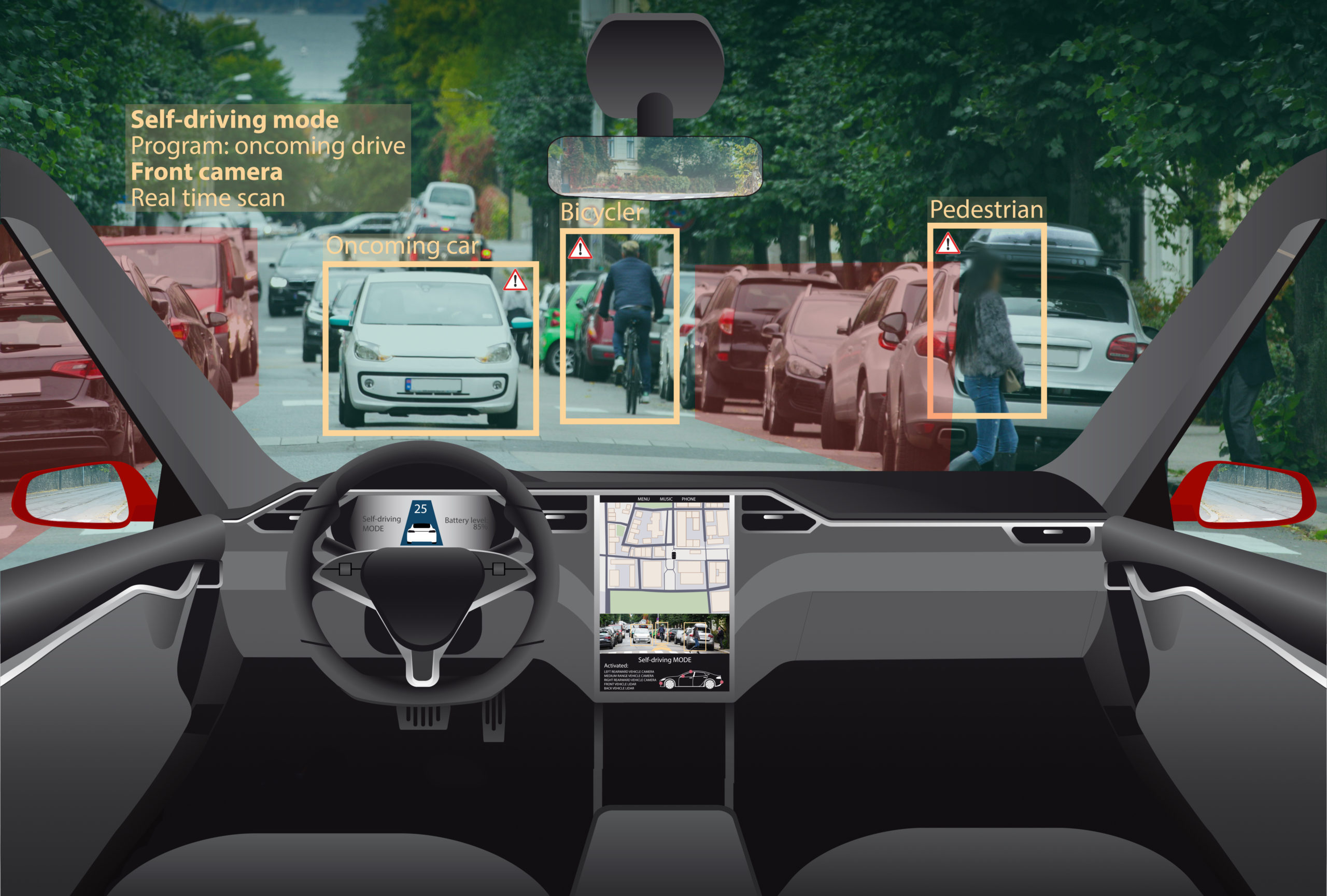
Figure 4 Processed view of the road ahead
A vehicle travelling at 100 km/h (about 62 mph) is covering about 28 metres every second. This means that in just 10 mS (milliseconds) the car will still move 28 cm. The need for very fast processors is clear. In addition, because of the complexity of automated driving a huge quantity of data is generated. When an A380 Airbus flies from London to New York in auto-pilot mode it requires about 2.5 MB of data. A level 4 vehicle can require 45 TB of data just to handle routine tasks.
Barbeque (2030)
By coincidence 12 years after the last BBQ, I met the same chap! He told me that it would be a while before autonomous cars really caught on. I tapped my phone a few times, mine turned up and took me home.