Part four in a guest blog series by Tom Denton
Introduction
Automated driving vehicles (ADVs) need to sense or perceive their surroundings. Unlike a human, a car perceives its surroundings through a number of sensors rather than senses, the information from these sensors is processed after which we can say that it has perception.
The main sensors used by an ADV are:
- Cameras
- Radar
- Lidar
- Ultrasonic
- GPS
In addition to these sensors, V2X and cloud information can be used, for example, communication about a traffic jam ahead or the vehicle in front providing information on the gap from it to the car in front. Some designs use all of these sensors, some use a different combination.
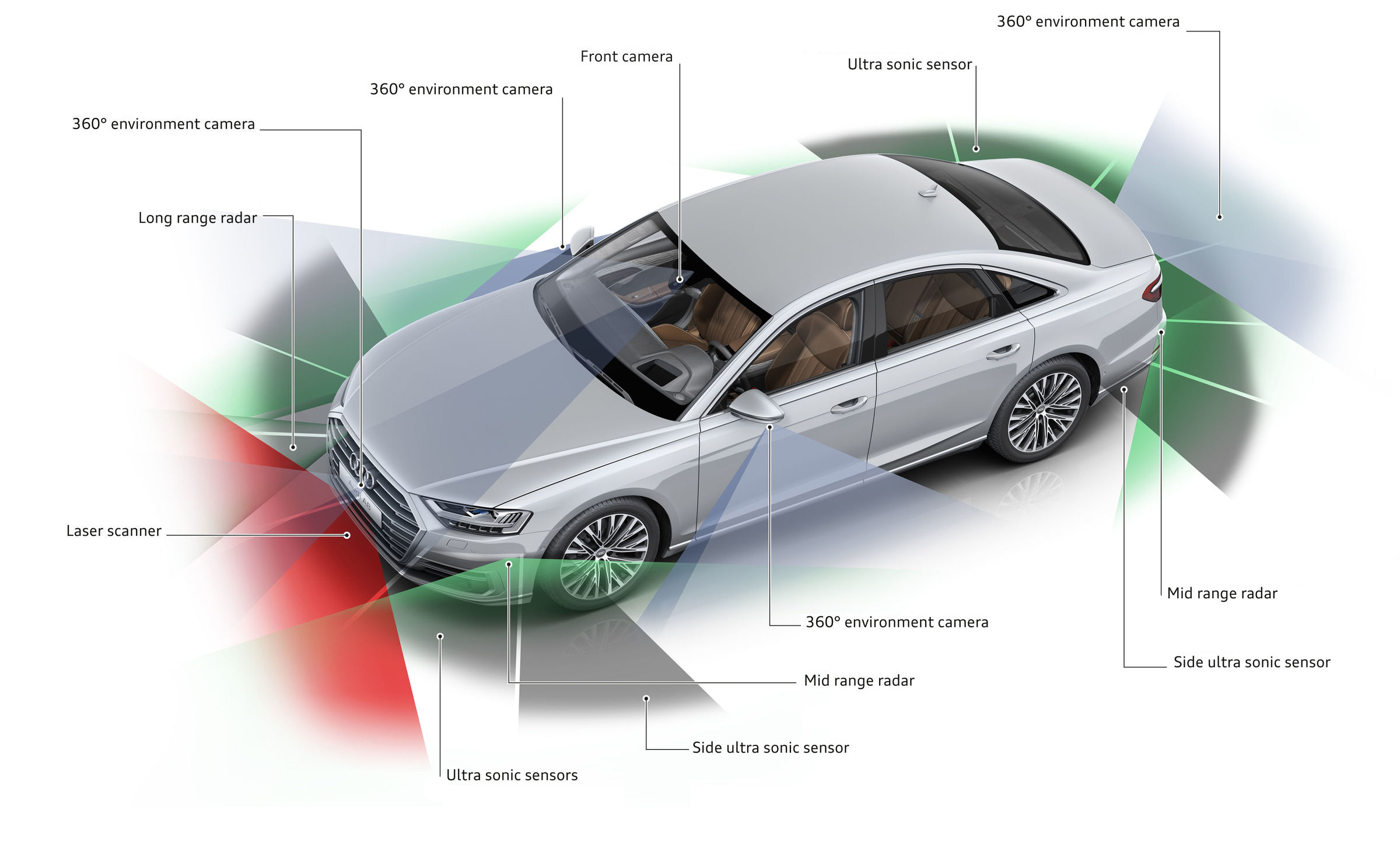
Figure 11 Perception areas (Source: Audi)
Cameras
Cameras are essential for object detection. They supply the vehicle with the data so that it can use AI to detect objects, such as other vehicles, pedestrians and road signs. Cameras can measure angles precisely so that, for example, the vehicle can determine if an approaching vehicle is likely to turn.
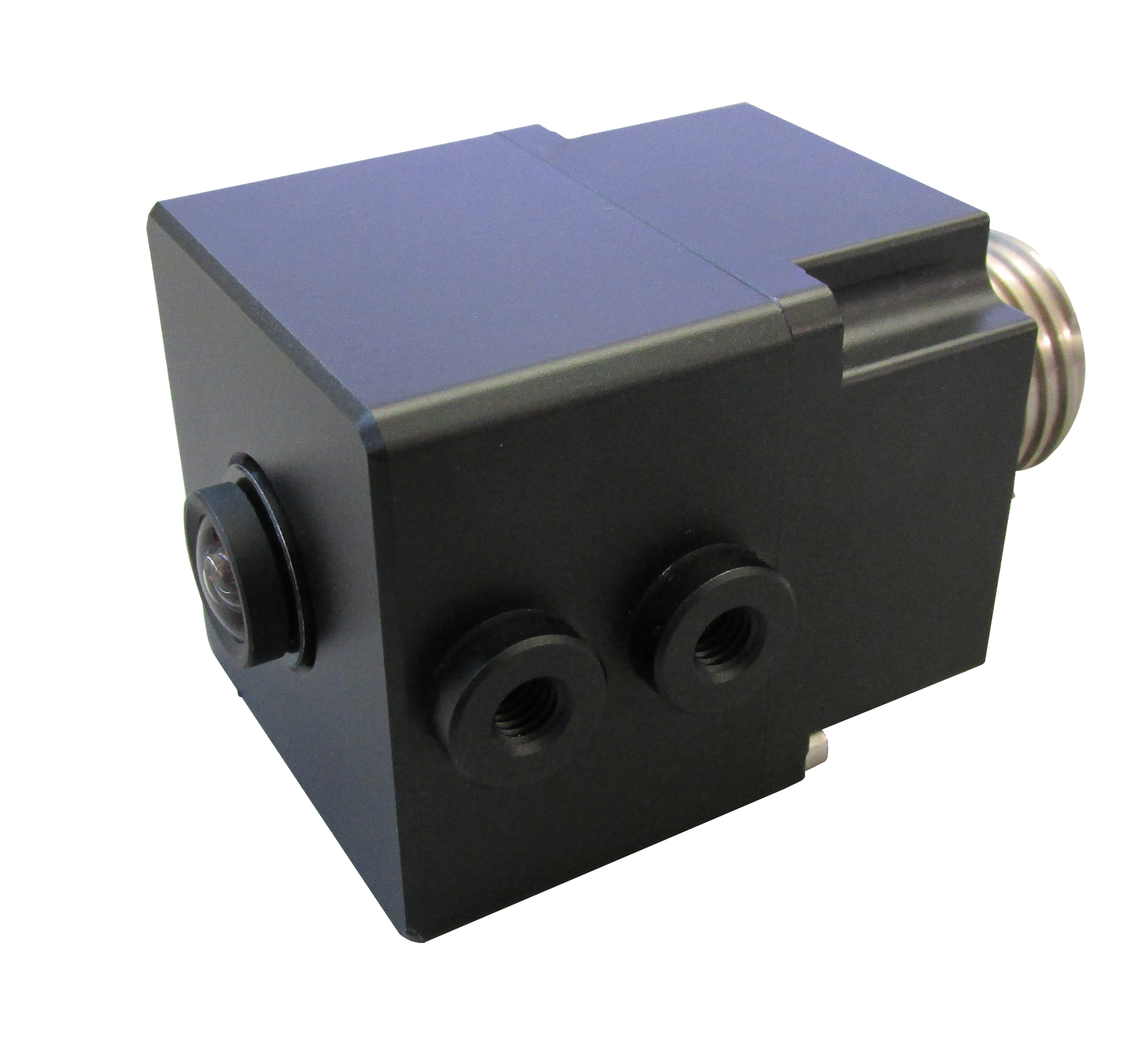
Figure 12 High resolution camera (Source: First Sensor AG)
A wide field of view is for smaller roads in towns and up to 300 meters with a narrow angle of vision are ideal on major roads. Cameras will also ‘see’ the lane markings so a lane keeping assist function is possible.
Radar
Radar systems are an active technology. They emit electromagnetic waves and receive an ‘echo’ that is reflected back from objects. Radar sensors can provide information about the distance and relative speed of these objects. They are very accurate, which makes them ideal for active cruise control (ACC), collision warnings and emergency brake assist (EBA) systems, as well as ADVs.

Figure 13 Radar sensor (Source: Bosch Media)
Radar sensors use radio waves so will operate regardless of weather, light or visibility conditions. That makes them an important component in the sensor set. This type of sensor is ideal for highly automated and autonomous driving due to its high resolution.
LiDAR
Lidar sensors work like radar using the echo principle, except they use laser pulses instead of radio waves. They can record distances and relative speeds just the same as radar. However, objects and angles are recognised with a much higher level of accuracy. The sensors can see complex traffic situations in the dark too.
High-resolution 3D solid state lidar sensors can display pedestrians and smaller objects three dimensionally. These sensors use solid-state technology, which is very robust due to the lack of moving components.

Figure 14 Lidar sensors (Source: Velodyne Lidar)
Ultrasound
Ultrasonic range sensors are often fitted to a vehicle as simple reversing aids but also as a way of filling gaps not covered by other sensors. Generally, a number of intelligent sensors are used to form a detection zone as wide or as long as the vehicle. The ultrasound processing system is relatively simple as the level of discrimination required is low and the sensors only has to operate over short distances.

Figure 15 Ultrasound sensor
Summary
Cameras, ultrasonic, sound, radar and lidar sensors have advantages and disadvantages. However, if they are combined intelligently, the result is a detailed and reliable three hundred and sixty degrees view. This prevents blind spots, even in complex situations. When the information from several devices is combined, the accuracy improves and a more complete image with more detail is produced. An ADV must unequivocally comprehend every traffic situation even in poor weather and lighting conditions.